from joshpy.strategies import cv_objective
# Built-in objective for stability optimization
# cv_objective(variable, burn_in) returns a function that computes
# coefficient of variation (std/mean) for the given variable,
# skipping the first `burn_in` steps.
BURN_IN_STEPS = 50
stability_objective = cv_objective("totalCover", burn_in=BURN_IN_STEPS)Adaptive Parameter Optimization
Using Optuna to intelligently search parameter space
Introduction
This tutorial demonstrates adaptive parameter sweeps using Optuna’s Bayesian optimization. Unlike exhaustive grid search (CartesianStrategy), adaptive sweeps:
- Learn from results: Each trial informs the next parameter selection
- Focus on promising regions: Spend more trials where objectives are better
- Efficient exploration: Find good parameters with fewer total trials
We’ll optimize fire damage parameters in a grass-shrub ecosystem to achieve stable vegetation dynamics (minimize coefficient of variation over time).
Prerequisites:
- Familiarity with SweepManager Workflow
- Install with adaptive support:
pip install joshpy[adaptive]
The Model
Our grass/shrub ecosystem has balancing feedback via fire disturbance:
- High vegetation cover → more frequent fires → reduced cover
- Low cover → fewer fires → recovery
For a detailed walkthrough of this model, see the Grass-Shrub Fire Guide on joshsim.org.
Optimization Goal
We optimize grassDamage and shrubDamage (50-95%) to minimize the coefficient of variation (CV) of total vegetation cover over time.
The objective function:
- Skips the first 50 timesteps (burn-in) to ignore transient dynamics
- For each replicate, computes the spatially-averaged cover at each timestep
- Computes CV = std / mean for each replicate’s time series
- Returns the mean CV across all replicates
This per-replicate approach correctly detects instability even when replicates oscillate out of phase (which would be hidden by averaging across replicates first). Lower CV means more stable dynamics—the system stays near equilibrium rather than oscillating wildly.
NoteView Configuration Template (adaptive_config.jshc.j2)
# Fire damage parameters for adaptive optimization
# Swept by Optuna to find stable vegetation dynamics
# Grass fire damage (% of cover lost per fire event)
grassDamage = {{ grassDamage }} percent
# Shrub fire damage (% of cover lost per fire event)
shrubDamage = {{ shrubDamage }} percent
NoteView Simulation File (adaptive_fire.josh)
# Grass-shrub fire dynamics simulation for adaptive optimization demo
# Demonstrates balancing feedback for stability optimization
#
# This model creates potential for stable equilibria that depend on fire damage
# parameters. We can optimize to find parameters that minimize population
# variance (stability).
#
# Balancing feedback:
# - High cover -> more fires -> reduced cover
# - Low cover -> fewer fires -> growth recovers
start simulation Main
# Small 4x4 grid for fast execution (16 patches)
# 5km cells with bounding box sized for 4x4 layout
grid.size = 5000 m
grid.low = 33.8 degrees latitude, -116.0 degrees longitude
grid.high = 33.98 degrees latitude, -115.78 degrees longitude
grid.patch = "Default"
# 100 steps to reach equilibrium and observe long-term stability
steps.low = 0 count
steps.high = 100 count
# Output exports to files (run_hash passed as custom-tag by joshpy)
exportFiles.patch = "file:///tmp/adaptive_fire_{run_hash}_{replicate}.csv"
# Fire trigger parameters (fixed)
fire.trigger.coverThreshold = 30 percent
fire.trigger.highProb = 8 percent
fire.trigger.typicalProb = 2 percent
# Fire damage parameters (from config - swept by Optuna)
fire.damage.grass = config adaptive_config.grassDamage
fire.damage.shrub = config adaptive_config.shrubDamage
end simulation
start patch Default
# Initialize vegetation cover randomly (0-30% each type)
grassCover.init = sample uniform from 0 percent to 30 percent
shrubCover.init = sample uniform from 0 percent to 30 percent
# Total vegetation determines fire risk
totalCover.step = prior.grassCover + prior.shrubCover
# Fire probability depends on total cover
isHighCover.step = totalCover > meta.fire.trigger.coverThreshold
fireProbability.step = meta.fire.trigger.highProb if isHighCover else meta.fire.trigger.typicalProb
# Stochastic fire occurrence
fireRoll.step = sample uniform from 0 percent to 100 percent
onFire.step = fireRoll < fireProbability
# Fire damage with some variability
damageGrass.step = sample normal with mean of meta.fire.damage.grass std of 5 percent
damageShrub.step = sample normal with mean of meta.fire.damage.shrub std of 5 percent
# Constant growth rates
growthGrass.step = 4 percent
growthShrub.step = 3 percent
# Apply growth or fire damage
grassCover.step = {
const afterFire = prior.grassCover * (100 percent - damageGrass)
const afterGrowth = prior.grassCover + growthGrass
const newValue = afterFire if onFire else afterGrowth
return limit newValue to [0 percent, 100 percent]
}
shrubCover.step = {
const afterFire = prior.shrubCover * (100 percent - damageShrub)
const afterGrowth = prior.shrubCover + growthShrub
const newValue = afterFire if onFire else afterGrowth
return limit newValue to [0 percent, 100 percent]
}
# Export patch-level vegetation cover
export.grassCover.step = grassCover
export.shrubCover.step = shrubCover
export.totalCover.step = totalCover
export.onFire.step = onFire
end patch
start unit year
alias years
alias yr
end unitStep 1: Define the Objective Function
TipCustom Objectives
Objective functions have signature (registry, run_hash, job) -> float. Lower values are better (for direction="minimize"). Return float('inf') for failed/invalid runs.
Step 2: Configure with OptunaStrategy
from pathlib import Path
from joshpy.jobs import JobConfig, SweepConfig, ConfigSweepParameter
from joshpy.strategies import OptunaStrategy
SOURCE_PATH = Path("../../examples/adaptive_fire.josh")
TEMPLATE_PATH = Path("../../examples/templates/adaptive_config.jshc.j2")
DAMAGE_VALUES = list(range(50, 96, 5)) # 50, 55, ..., 95
config = JobConfig(
template_path=TEMPLATE_PATH,
source_path=SOURCE_PATH,
simulation="Main",
replicates=3,
sweep=SweepConfig(
config_parameters=[
ConfigSweepParameter(name="grassDamage", values=DAMAGE_VALUES),
ConfigSweepParameter(name="shrubDamage", values=DAMAGE_VALUES),
],
strategy=OptunaStrategy(
n_trials=30,
direction="minimize",
sampler="tpe",
),
),
)Adaptive vs Cartesian Search
| CartesianStrategy | OptunaStrategy |
|---|---|
| All 100 combinations | 30 intelligently-chosen trials |
| No learning | Each trial informs the next |
| Exhaustive | Efficient for large spaces |
Step 3: Run the Sweep
from joshpy.sweep import SweepManager
from joshpy.cli import JoshCLI
from joshpy.jar import JarMode
REGISTRY_PATH = "adaptive_demo.duckdb"
manager = (
SweepManager.builder(config)
.with_registry(REGISTRY_PATH, experiment_name="fire_stability")
.with_cli(JoshCLI(josh_jar=JarMode.DEV))
.build()
)
result = manager.run(objective=stability_objective)[I 2026-03-27 21:40:55,668] A new study created in memory with name: no-name-de816683-8d09-43d6-8b27-9239092d3bcd
Running adaptive sweep with 30 trials
Direction: minimize
Sampler: tpe
[1/30] Params: {'grassDamage': 95, 'shrubDamage': 75}
[OK] metric=0.0969 (rows=7575)
[2/30] Params: {'grassDamage': 75, 'shrubDamage': 65}
[OK] metric=0.0952 (rows=7575)
[3/30] Params: {'grassDamage': 60, 'shrubDamage': 50}
[OK] metric=0.0821 (rows=7575)
[4/30] Params: {'grassDamage': 50, 'shrubDamage': 90}
[OK] metric=0.0860 (rows=7575)
[5/30] Params: {'grassDamage': 65, 'shrubDamage': 95}
[OK] metric=0.1030 (rows=7575)
[6/30] Params: {'grassDamage': 50, 'shrubDamage': 85}
[OK] metric=0.0701 (rows=7575)
[7/30] Params: {'grassDamage': 90, 'shrubDamage': 60}
[OK] metric=0.0772 (rows=7575)
[8/30] Params: {'grassDamage': 90, 'shrubDamage': 65}
[OK] metric=0.1182 (rows=7575)
[9/30] Params: {'grassDamage': 95, 'shrubDamage': 90}
[OK] metric=0.1206 (rows=7575)
[10/30] Params: {'grassDamage': 75, 'shrubDamage': 75}
[OK] metric=0.1238 (rows=7575)
[11/30] Params: {'grassDamage': 50, 'shrubDamage': 85}
[OK] metric=0.0641 (rows=7575)
[12/30] Params: {'grassDamage': 50, 'shrubDamage': 85}
[OK] metric=0.0502 (rows=7575)
[13/30] Params: {'grassDamage': 50, 'shrubDamage': 85}
[OK] metric=0.0457 (rows=7575)
[14/30] Params: {'grassDamage': 85, 'shrubDamage': 85}
[OK] metric=0.1139 (rows=7575)
[15/30] Params: {'grassDamage': 70, 'shrubDamage': 80}
[OK] metric=0.1087 (rows=7575)
[16/30] Params: {'grassDamage': 55, 'shrubDamage': 55}
[OK] metric=0.0698 (rows=7575)
[17/30] Params: {'grassDamage': 80, 'shrubDamage': 70}
[OK] metric=0.1218 (rows=7575)
[18/30] Params: {'grassDamage': 50, 'shrubDamage': 85}
[OK] metric=0.0390 (rows=7575)
[19/30] Params: {'grassDamage': 50, 'shrubDamage': 85}
[OK] metric=0.0375 (rows=7575)
[20/30] Params: {'grassDamage': 70, 'shrubDamage': 95}
[OK] metric=0.1118 (rows=7575)
[21/30] Params: {'grassDamage': 55, 'shrubDamage': 55}
[OK] metric=0.0396 (rows=7575)
[22/30] Params: {'grassDamage': 55, 'shrubDamage': 55}
[OK] metric=0.0335 (rows=7575)
[23/30] Params: {'grassDamage': 55, 'shrubDamage': 55}
[OK] metric=0.0325 (rows=7575)
[24/30] Params: {'grassDamage': 55, 'shrubDamage': 55}
[OK] metric=0.0316 (rows=7575)
[25/30] Params: {'grassDamage': 55, 'shrubDamage': 55}
[OK] metric=0.0279 (rows=7575)
[26/30] Params: {'grassDamage': 55, 'shrubDamage': 55}
[OK] metric=0.0282 (rows=7575)
[27/30] Params: {'grassDamage': 55, 'shrubDamage': 55}
[OK] metric=0.0238 (rows=7575)
[28/30] Params: {'grassDamage': 55, 'shrubDamage': 55}
[OK] metric=0.0258 (rows=7575)
[29/30] Params: {'grassDamage': 55, 'shrubDamage': 55}
[OK] metric=0.0226 (rows=7575)
[30/30] Params: {'grassDamage': 65, 'shrubDamage': 60}
[OK] metric=0.0830 (rows=7575)
Adaptive sweep complete:
Trials: 30 (30 succeeded, 0 failed)
Best value: 0.022636657997383302
Best params: {'grassDamage': 55, 'shrubDamage': 55}print(f"Best parameters: {result.best_params}")Best parameters: {'grassDamage': 55, 'shrubDamage': 55}print(f"Best CV: {result.best_value:.4f}")Best CV: 0.0226
# Fail the tutorial if any jobs failed - include actual error details
if result.failed > 0:
errors = []
for job, cli_result in result.job_results:
if not cli_result.success:
error_msg = cli_result.stderr.strip() if cli_result.stderr else "No error message"
errors.append(f"Job {job.run_hash}: {error_msg[:500]}")
error_detail = "\n".join(errors)
raise RuntimeError(f"Adaptive sweep had {result.failed} failed trial(s)\n\n{error_detail}")
NoteError Handling
By default, stop_on_failure=True raises SweepExecutionError on first failure. Use stop_on_failure=False for exploratory runs where some failures are expected.
Step 4: Optimization Results
Trial Summary
summary = result.get_trial_summary()
print(f"Completed: {summary['n_completed']}/{summary['n_trials']} trials")Completed: 30/30 trialsprint(f"Best CV: {summary['best_value']:.4f}")Best CV: 0.0226print(f"Mean CV: {summary['mean_value']:.4f}")Mean CV: 0.0695Optimization Progress
import matplotlib.pyplot as plt
import numpy as np
metrics = result.trial_metrics
cumulative_best = np.minimum.accumulate(metrics)
fig, ax = plt.subplots(figsize=(10, 4))
ax.scatter(range(1, len(metrics) + 1), metrics, alpha=0.6, label='Trial CV')
ax.plot(range(1, len(metrics) + 1), cumulative_best, 'r-', linewidth=2, label='Best so far')
ax.set_xlabel('Trial Number')
ax.set_ylabel('Coefficient of Variation')
ax.set_title('Optimization Progress')
ax.legend()
plt.tight_layout()
plt.show()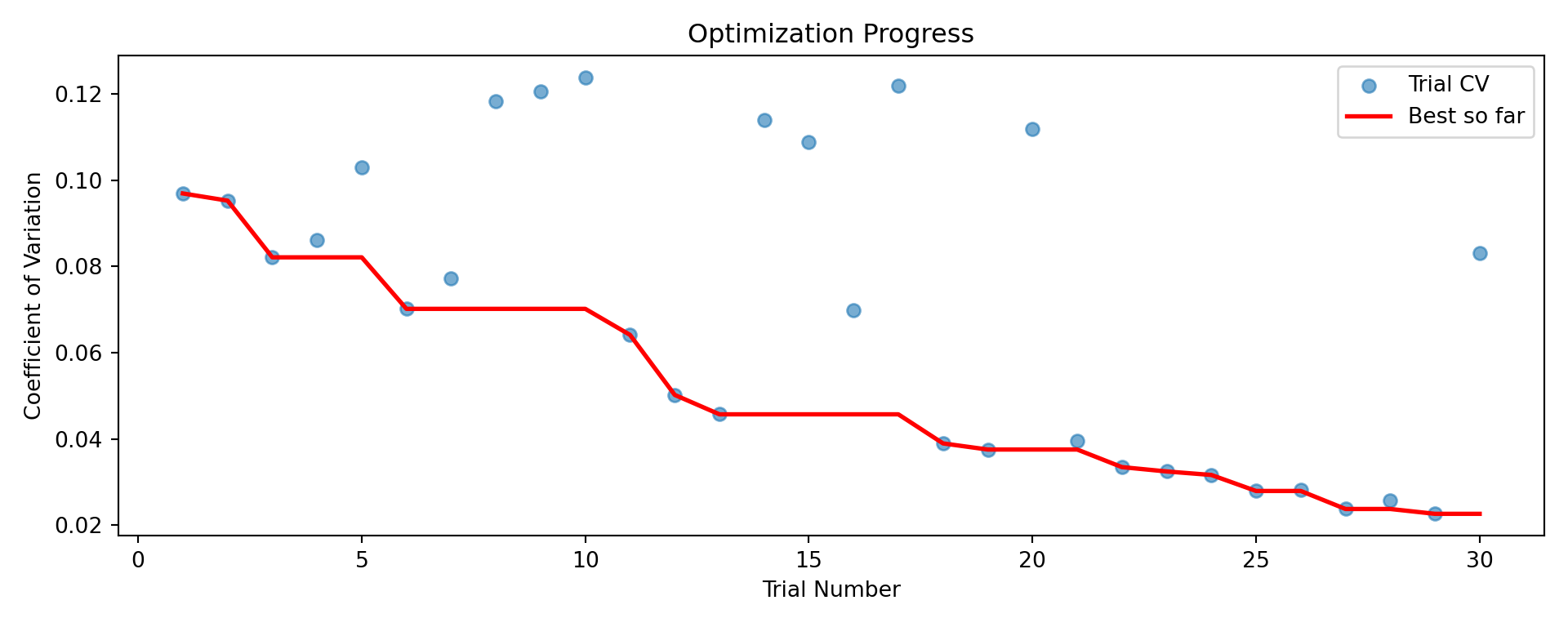
Parameter Space Exploration
import pandas as pd
trial_data = []
for i, (job, _) in enumerate(result.job_results):
cv = metrics[i] if metrics[i] < float('inf') else None
trial_data.append({
'grassDamage': job.parameters['grassDamage'],
'shrubDamage': job.parameters['shrubDamage'],
'cv': cv,
})
df_trials = pd.DataFrame(trial_data).dropna()
plt.figure(figsize=(8, 6))<Figure size 800x600 with 0 Axes>scatter = plt.scatter(df_trials['grassDamage'], df_trials['shrubDamage'],
c=df_trials['cv'], cmap='plasma_r', s=100, alpha=0.8)
plt.colorbar(scatter, label='CV (lower = stable)')<matplotlib.colorbar.Colorbar object at 0x7fd95c1b3380>plt.xlabel('Grass Damage (%)')Text(0.5, 0, 'Grass Damage (%)')plt.ylabel('Shrub Damage (%)')Text(0, 0.5, 'Shrub Damage (%)')plt.title('Parameter Space Exploration')Text(0.5, 1.0, 'Parameter Space Exploration')plt.tight_layout()
plt.show()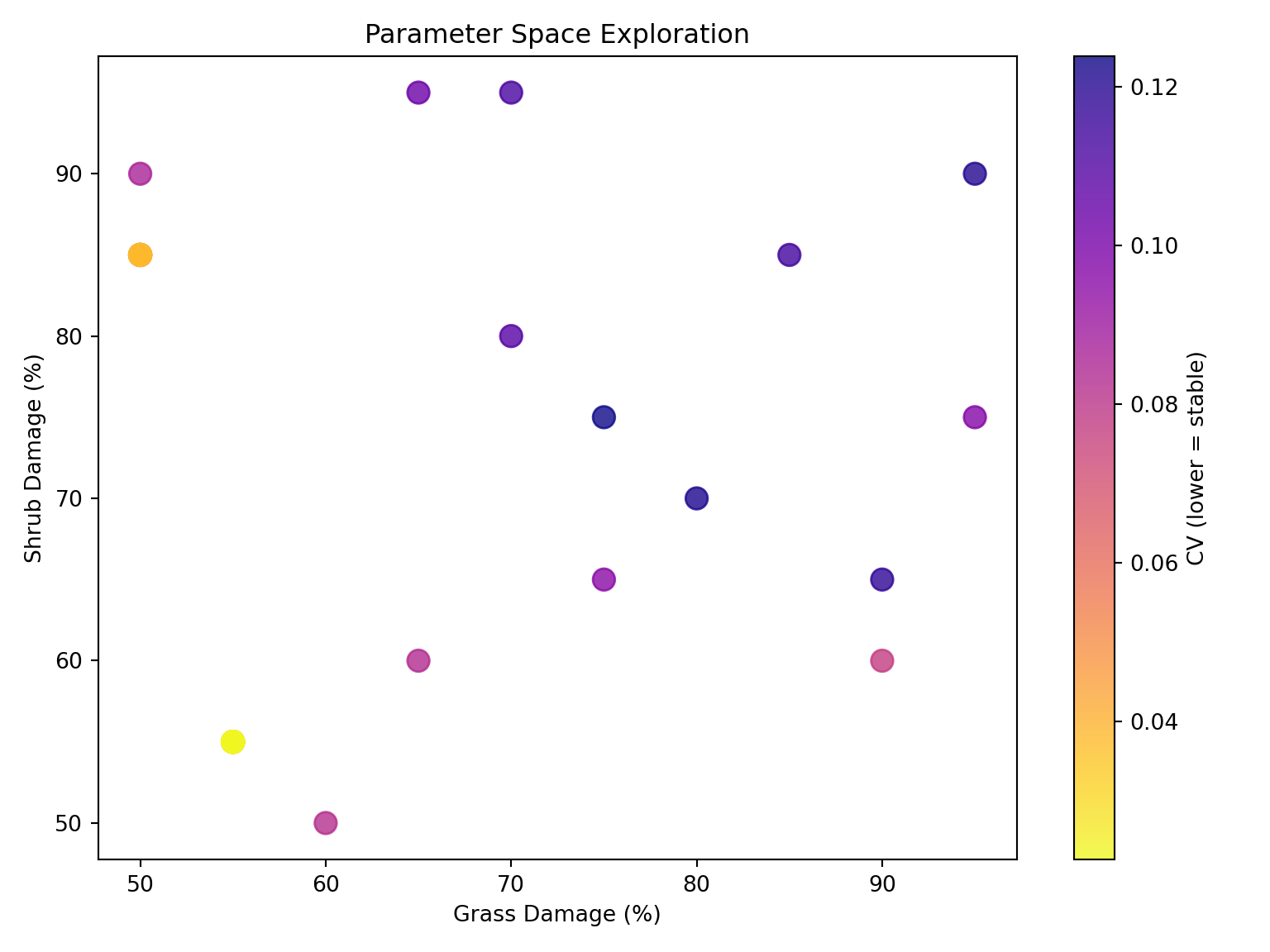
Step 5: Analyze Vegetation Dynamics
The real value is understanding why certain parameters are stable. We use the same analysis tools from Analysis & Visualization.
Best vs Worst Parameters
from joshpy.diagnostics import SimulationDiagnostics
from joshpy.cell_data import DiagnosticQueries
queries = DiagnosticQueries(manager.registry)
best_job = result.get_best_job()
# Note: This worst-job finding is for illustration purposes.
# In practice, you'd typically focus on the best parameters
# and use Optuna's built-in visualization tools.
finite = [(i, m) for i, m in enumerate(metrics) if m < float('inf')]
worst_idx = max(finite, key=lambda x: x[1])[0]
worst_job, _ = result.job_results[worst_idx]
fig, axes = plt.subplots(1, 2, figsize=(12, 4), sharey=True)
# Get CVs for labels
best_cv = result.best_value
worst_cv = metrics[worst_idx]
for ax, job, label, cv in [(axes[0], best_job, "BEST (stable)", best_cv),
(axes[1], worst_job, "WORST (unstable)", worst_cv)]:
df = queries.get_replicate_uncertainty("totalCover", run_hash=job.run_hash)
ax.fill_between(df['step'], df['mean'] - df['std'], df['mean'] + df['std'], alpha=0.3)
ax.plot(df['step'], df['mean'], linewidth=2)
ax.axvline(50, color='gray', linestyle='--', alpha=0.5, label='Burn-in')
ax.set_xlabel('Time Step')
ax.set_title(f"{label}\ngrass={job.parameters['grassDamage']}%, shrub={job.parameters['shrubDamage']}%, CV={cv:.4f}")
if ax == axes[0]:
ax.set_ylabel('Total Cover')
ax.legend()<matplotlib.collections.FillBetweenPolyCollection object at 0x7fd9451017f0>
[<matplotlib.lines.Line2D object at 0x7fd945101a90>]
<matplotlib.lines.Line2D object at 0x7fd9451016a0>
Text(0.5, 0, 'Time Step')
Text(0.5, 1.0, 'BEST (stable)\ngrass=55%, shrub=55%, CV=0.0226')
Text(0, 0.5, 'Total Cover')
<matplotlib.legend.Legend object at 0x7fd945101940>
<matplotlib.collections.FillBetweenPolyCollection object at 0x7fd944f6d310>
[<matplotlib.lines.Line2D object at 0x7fd945101fd0>]
<matplotlib.lines.Line2D object at 0x7fd945101d30>
Text(0.5, 0, 'Time Step')
Text(0.5, 1.0, 'WORST (unstable)\ngrass=75%, shrub=75%, CV=0.1238')plt.tight_layout()
plt.show()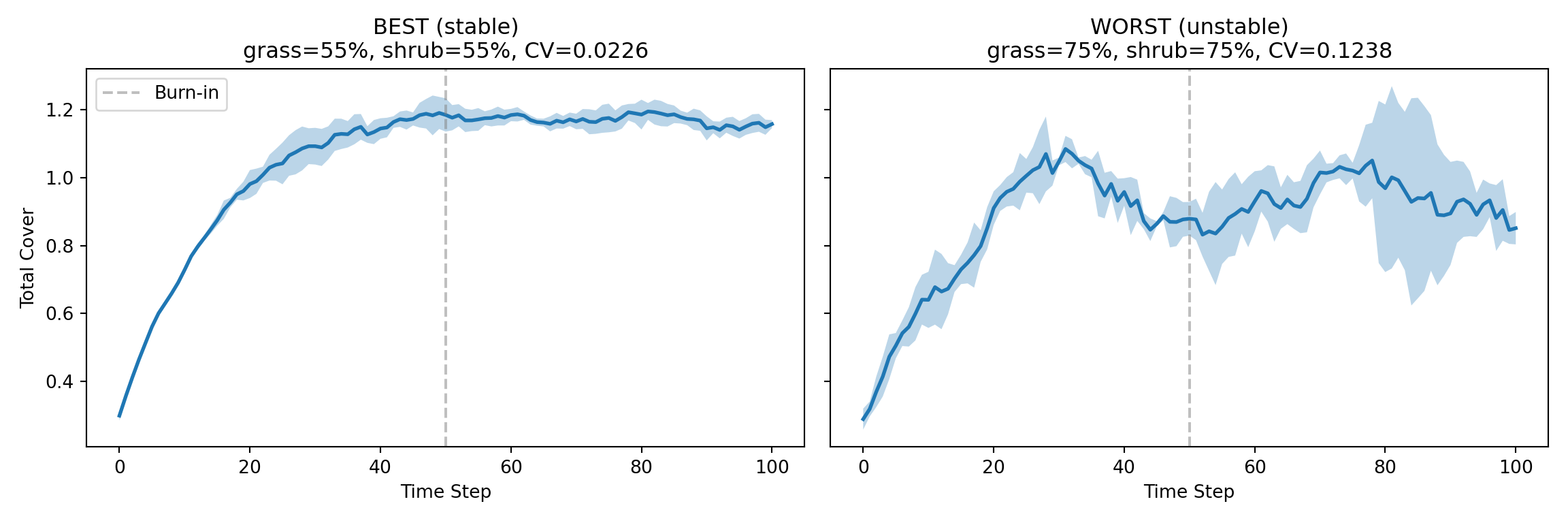
Species-Level Dynamics (Best Parameters)
df_grass = queries.get_replicate_uncertainty("grassCover", run_hash=best_job.run_hash)
df_shrub = queries.get_replicate_uncertainty("shrubCover", run_hash=best_job.run_hash)
fig, ax = plt.subplots(figsize=(10, 4))
ax.fill_between(df_grass['step'], df_grass['mean'] - df_grass['std'],
df_grass['mean'] + df_grass['std'], alpha=0.2, color='green')<matplotlib.collections.FillBetweenPolyCollection object at 0x7fd944e1d950>ax.plot(df_grass['step'], df_grass['mean'], color='green', linewidth=2, label='Grass')[<matplotlib.lines.Line2D object at 0x7fd944de1a90>]ax.fill_between(df_shrub['step'], df_shrub['mean'] - df_shrub['std'],
df_shrub['mean'] + df_shrub['std'], alpha=0.2, color='brown')<matplotlib.collections.FillBetweenPolyCollection object at 0x7fd944e1da90>ax.plot(df_shrub['step'], df_shrub['mean'], color='brown', linewidth=2, label='Shrub')[<matplotlib.lines.Line2D object at 0x7fd944de1be0>]ax.axvline(50, color='gray', linestyle='--', alpha=0.5, label='Burn-in')<matplotlib.lines.Line2D object at 0x7fd944de17f0>ax.set_xlabel('Time Step')Text(0.5, 0, 'Time Step')ax.set_ylabel('Cover')Text(0, 0.5, 'Cover')ax.set_title(f"Species Dynamics (grass={best_job.parameters['grassDamage']}%, shrub={best_job.parameters['shrubDamage']}%)")Text(0.5, 1.0, 'Species Dynamics (grass=55%, shrub=55%)')ax.legend()<matplotlib.legend.Legend object at 0x7fd944de1d30>plt.tight_layout()
plt.show()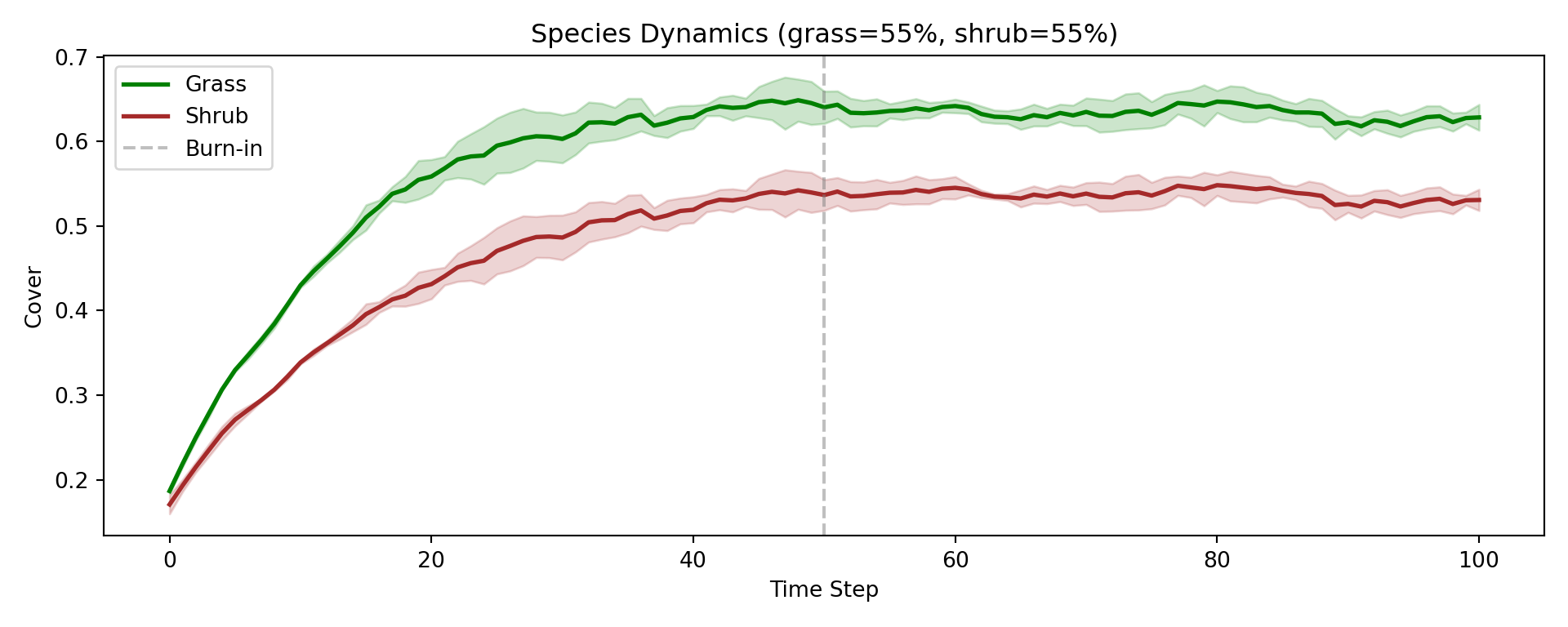
Registry Independence
The registry produced by adaptive sweeps is identical to one from cartesian sweeps or manual workflows. All analysis tools work the same:
# Same queries work regardless of how data was generated
print(f"Variables: {manager.registry.list_export_variables()}")Variables: ['grassCover', 'onFire', 'shrubCover', 'totalCover']print(f"Cell data rows: {manager.registry.get_data_summary().cell_data_rows}")Cell data rows: 227250See Analysis & Visualization for the full analysis toolkit.
When to Use Adaptive Sweeps
Use OptunaStrategy when: |
Use CartesianStrategy when: |
|---|---|
| Large parameter space | Small parameter space |
| Clear optimization objective | Need ALL combinations |
| Expensive simulations | Building response surfaces |
| “Good enough” parameters | Sensitivity analysis |
Learn More
- Optuna Documentation - Full optimization framework
- TPE Sampler - Default sampler details
- Analysis & Visualization - Query and visualize any registry
Cleanup
import os
manager.cleanup()
manager.close()
for f in ["adaptive_demo.duckdb", "adaptive_demo.duckdb.wal"]:
if os.path.exists(f):
os.remove(f)